
 Department of Computer Science and Engineering, Michigan State University
Department of Computer Science and Engineering, Michigan State UniversityI am a Ph. D. student in the Department of Computer Science and Engineering, Michigan State University. My current research is under the supervision of Prof. Zeng, in the INSS lab. Before that, I got my master degree from University of Chinese Academy of Sciences, in Institute of Computing Technology, under the supervision of Dr. Yao. I got my bachelor degree from Beijing University of Technology.
My research interest focus on:
• Wireless Sensing: Multimodal sensing using signals like mmWave, Lidar and visible light.
• Deep Learning: Neural networks for sensing and planning.
Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
Michigan State of UniversityDepartment of Computer Science and Engineering
Ph.D. StudentAug. 2025 - present -
 University of Chinese Academy of SciencesM.S. in Computer ScienceSep. 2022 - Jul. 2025
University of Chinese Academy of SciencesM.S. in Computer ScienceSep. 2022 - Jul. 2025 -
 Beijing University of TechnologyB.S. in Electronic EngineeringSep. 2018 - Jul. 2022
Beijing University of TechnologyB.S. in Electronic EngineeringSep. 2018 - Jul. 2022
Honors & Awards
-
Third Prize in National College Student Innovation and Entrepreneurship Annual Conference2022
-
Outstanding of Graduation in Beijing Univerisity of Technology2022
News
Selected Publications (view all )
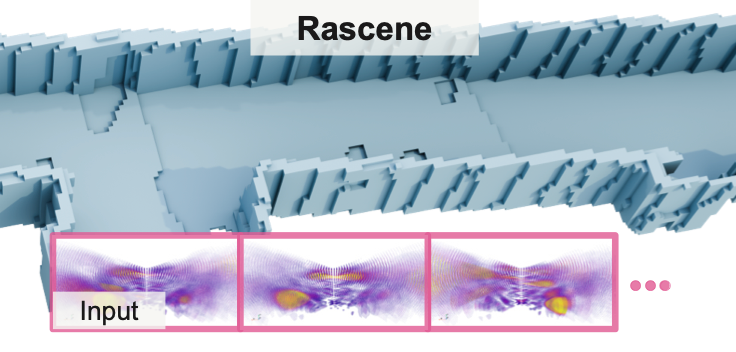
Rascene: High-Fidelity 3D Scene Imaging with mmWave Communication Signals
KunZhe Song, Geo Jie Zhou, Xiaoming Liu, Huacheng Zeng
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
Rascene: High-Fidelity 3D Scene Imaging with mmWave Communication Signals
KunZhe Song, Geo Jie Zhou, Xiaoming Liu, Huacheng Zeng
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026